Abstract
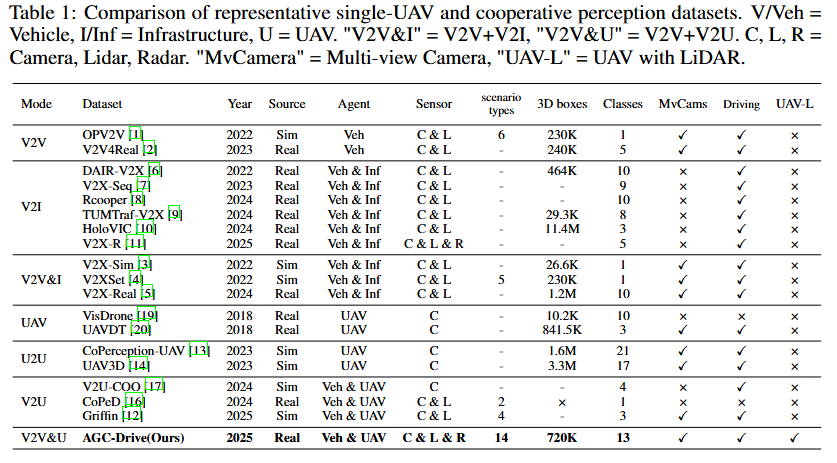
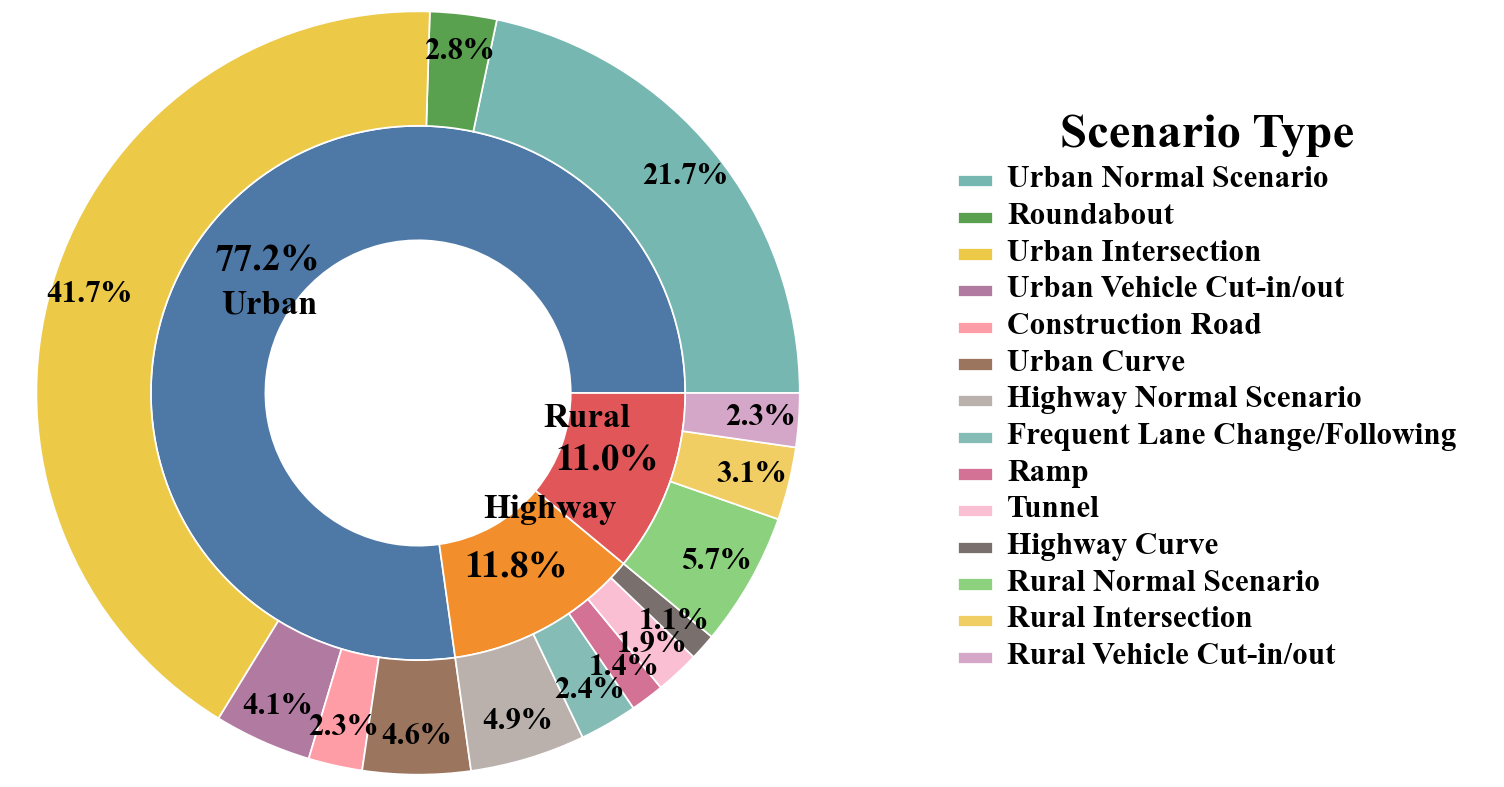
By sharing information across multiple agents, collaborative perception helps autonomous vehicles mitigate occlusions and improve overall perception accuracy. While most previous work focus on vehicle-to-vehicle and vehicle-to-infrastructure collaboration, with limited attention to aerial perspectives provided by UAVs, which uniquely offer dynamic, top-down views to alleviate occlusions and monitor large-scale interactive environments. A major reason for this is the lack of high-quality datasets for aerial-ground collaborative scenarios. To bridge this gap, we present AGC-Drive, the first large-scale real-world dataset for Aerial-Ground Cooperative 3D perception. The data collection platform consists of two vehicles, each equipped with five cameras and one LiDAR sensor, and one UAV carrying a forward-facing camera and a LiDAR sensor, enabling comprehensive multi-view and multi-agent perception. Consisting of approximately 80K LiDAR frames and 360K images, the dataset covers 14 diverse real-world driving scenarios, including urban roundabouts, highway tunnels, and on/off ramps. Notably, 17% of the data comprises dynamic interaction events, including vehicle cut-ins, cut-outs, and frequent lane changes. AGC-Drive contains 350 scenes, each with approximately 100 frames and fully annotated 3D bounding boxes covering 13 object categories. We provide benchmarks for two 3D perception tasks: vehicle-to-vehicle collaborative perception and vehicle-to-UAV collaborative perception. Additionally, we release an open-source toolkit, including spatiotemporal alignment verification tools, multi-agent visualization systems, and collaborative annotation utilities.


Video Presentation
Poster
BibTeX
@article{hou2025agc,
title={AGC-Drive: A Large-Scale Dataset for Real-World Aerial-Ground Collaboration in Driving Scenarios},
author={Hou, Yunhao and Zou, Bochao and Zhang, Min and Chen, Ran and Yang, Shangdong and Zhang, Yanmei and Zhuo, Junbao and Chen, Siheng and Chen, Jiansheng and Ma, Huimin},
journal={arXiv preprint arXiv:2506.16371},
year={2025}
}